

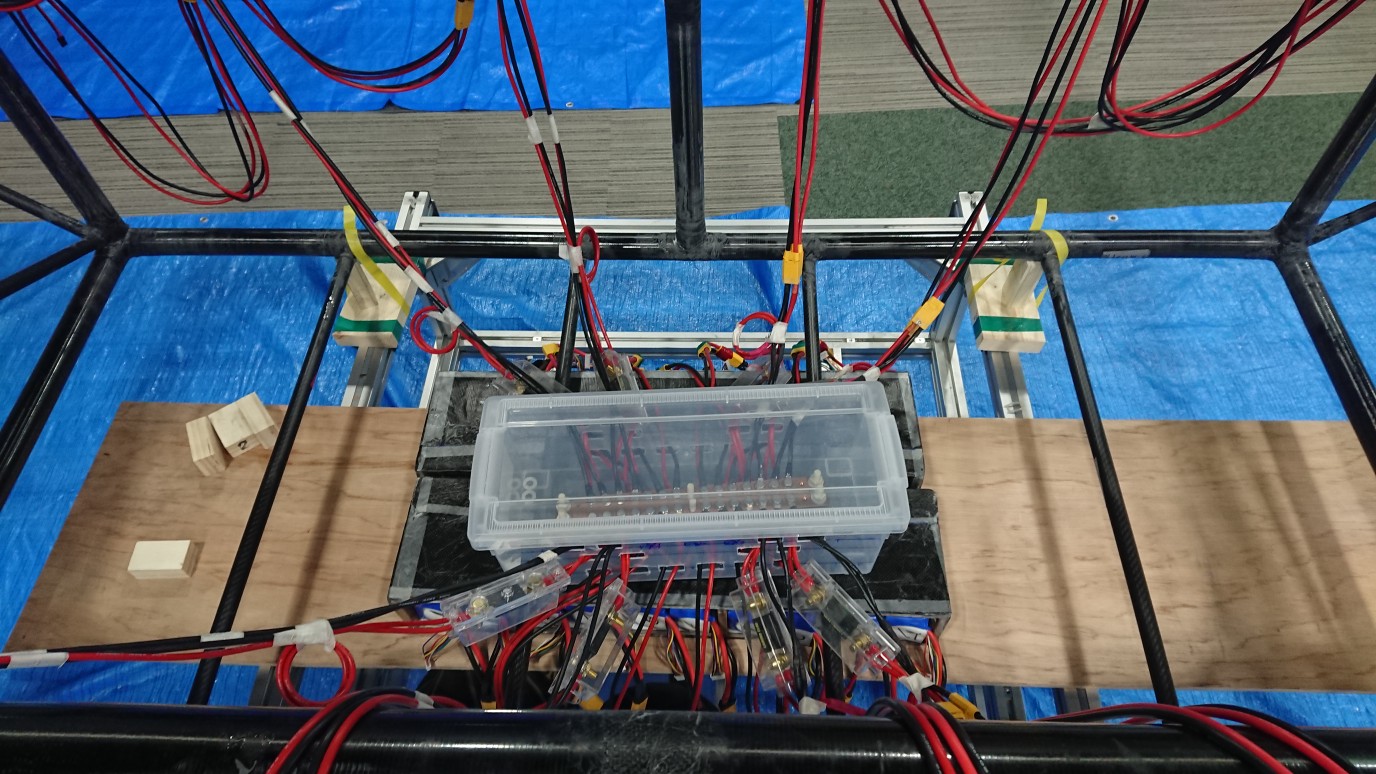








再度作り直した分電盤・高さ半分
スパークキラー
結線時に発生するスパーク防止


YouTube映像
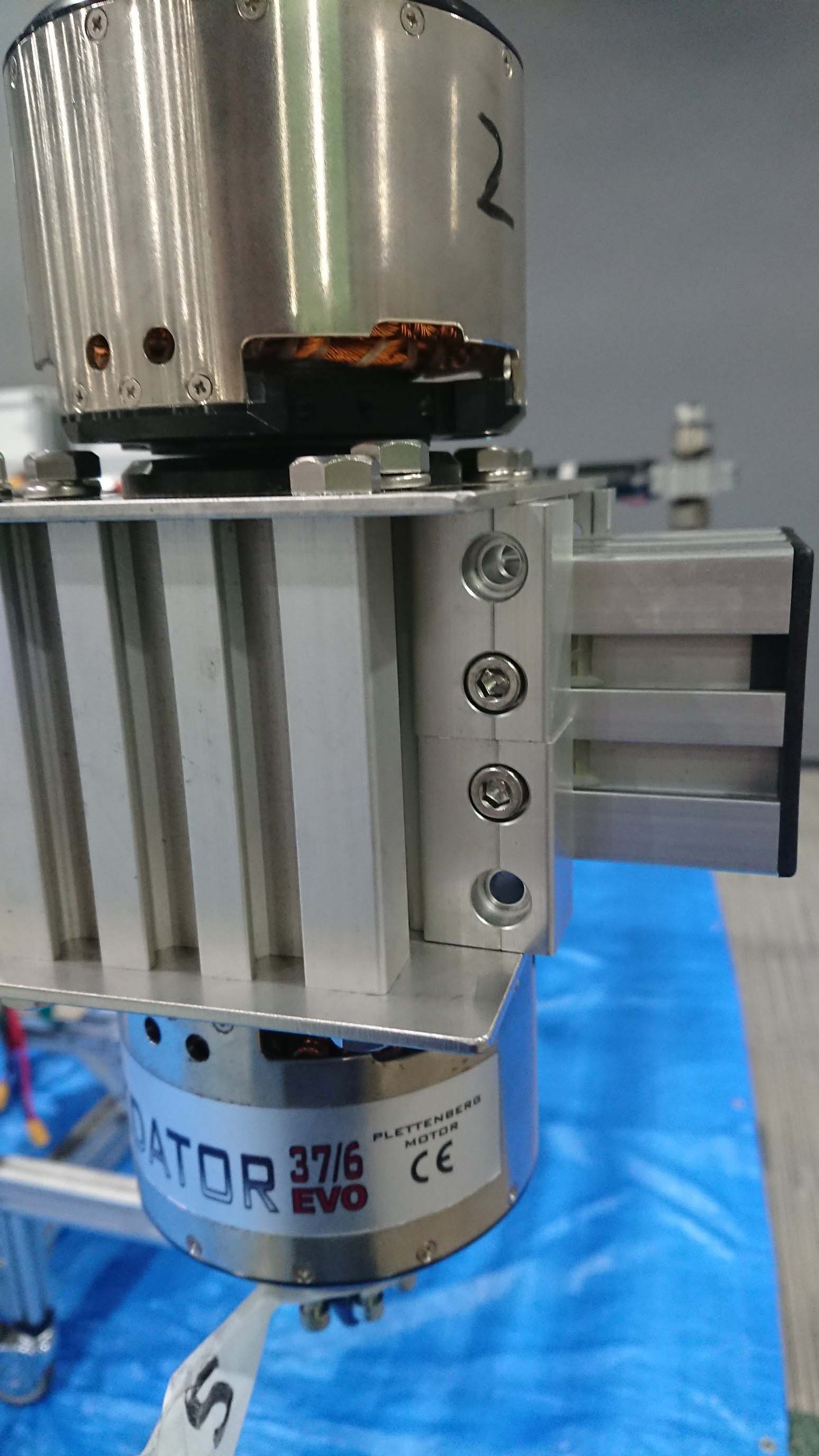
1番モーター・右・上
{kind=link}
Cartivatorから持ち込んだ際に
合わせたモーター位置とプロペラ
左前・2番・5番モーターと
モーター回転方向に合わせた
プロペラ位置
上下回転方向反対でOK
Cartivatorから持ち込んだ際に
合わせたモーター位置とプロペラ
左後ろ・3番・8番モーターと
モーター回転方向に合わせた
プロペラ位置
回転方向同じでおかしい
Cartivatorから持ち込んだ際に
合わせたモーター位置とプロペラ
右後ろ・4番・7番モーターと
モーター回転方向に合わせた
プロペラ位置

右前・1番・6番モーター
Cartivatorから持ち込んだ際に
合わせたプロペラ配置
後ろから見たプロペラ位置
後ろの4枚がおかしい。
左後ろは共にCW回転。
右後ろは共にCCW

前から見たプロペラ位置
前の4枚は正常に見える。
上下で回転方向反転。
左右で回転方向反対。
一応、辻褄が合うように
思えるが、、、

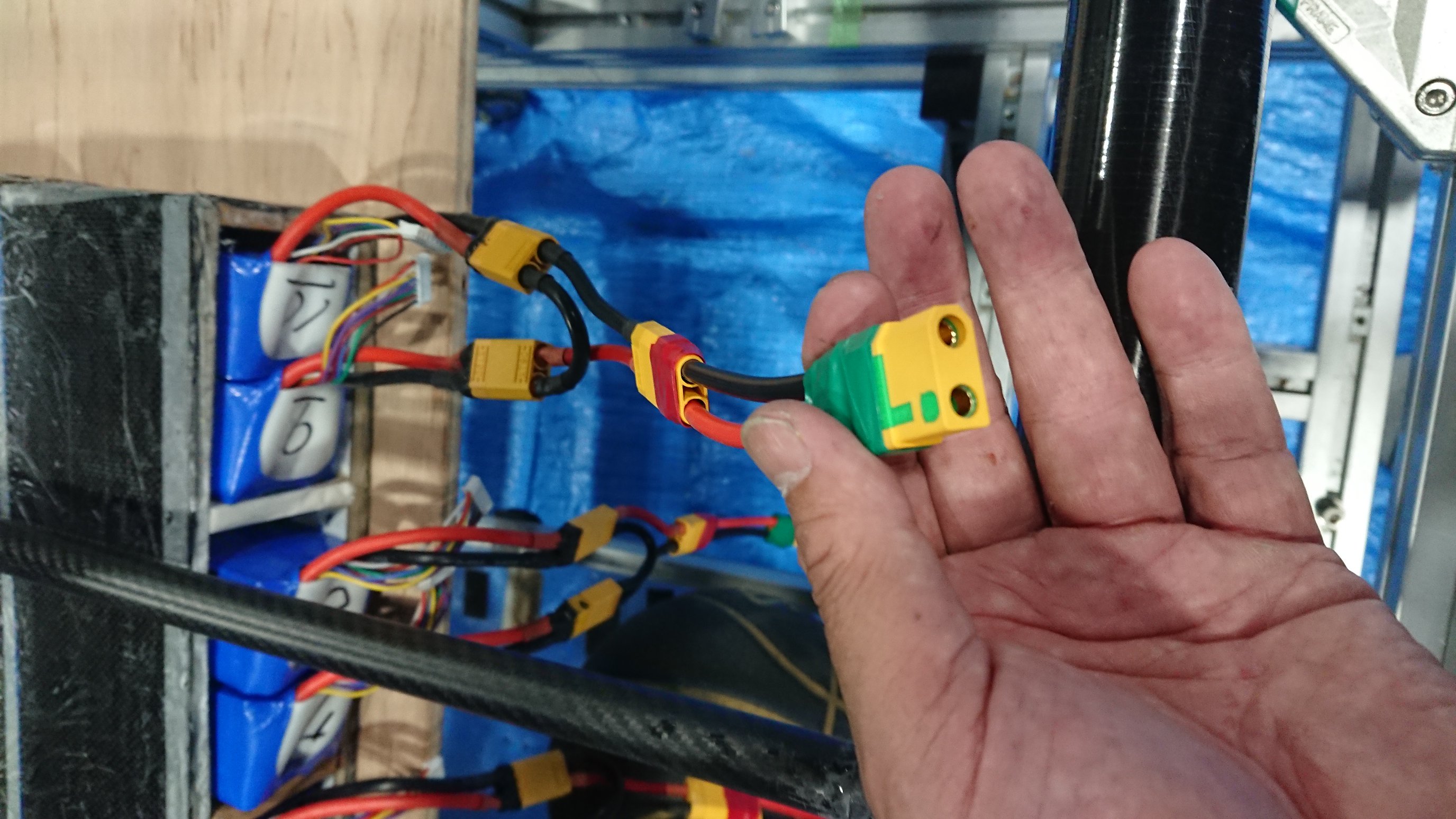
コネクター接続修正前の
モーター回転方向。
1番モーター回転方向が逆。
コネクター接続は全て色通り。

プロペラ配置
上下で反転しており正しい配置
に見えるが、、、
一応、FCから見る正規の取り付け方と
比較すると全部真逆になっている。
が、全部真逆でも、
1.プロペラの取り付けが上下逆、
2.モーターの回転も逆、
という事で理論的には
実際のトルクコンロールと
推力コントロールには問題が無い。
FCが賢く上のプロペラの効率と
下のプロペラの効率を計算して補正
している、とすると挙動は不安定になる。
まあ、
前後左右全部取り換えるのは簡単だ。
コネクターの抜き差しは簡単にできる。
JETI-BOXでもモーター回転方向を
自由に制御できる。